7. 产品信息
7.1 产品标签
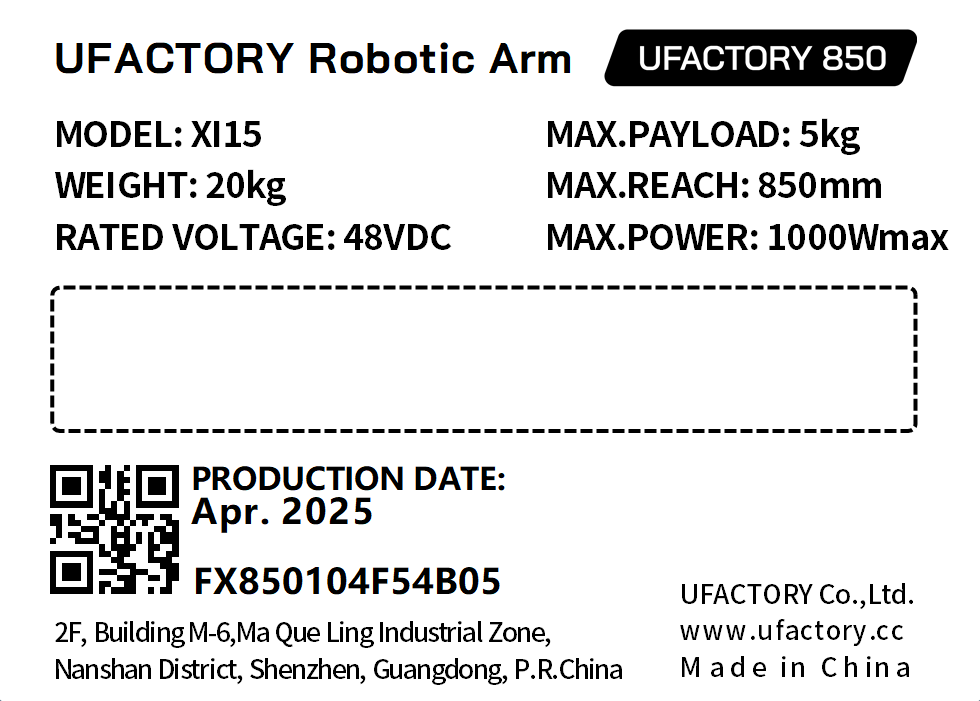
机械臂标签
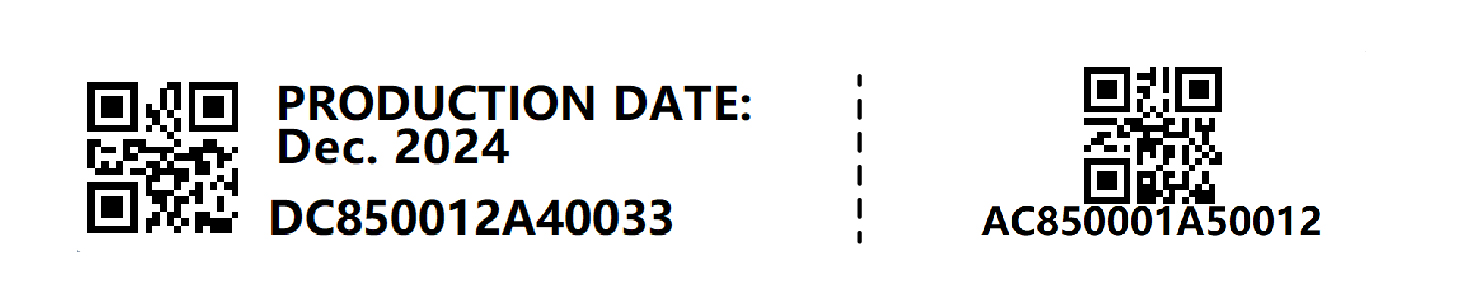
控制器标签
7.2 电磁兼容
- IEC 61000-6-2:2005
- IEC 61000-6-4/A1:2010
- EN 61000-6-2:2005 [2004/108/EC]
- EN 61000-6-4/A1:2011 [2004/108/EC]
电磁兼容性 (EMC)
第 6-2 部分:通用标准 - 工业环境的抗抗干扰
第 6-4 部分:通用标准 - 工业环境辐射标准
这些标准定义了对电气和电磁干扰的要求。 符合这些标准可确保 UFactory 850 机器人在工业环境中表现良好,并且不会干扰其他设备。 EN 61000-6-4:2019 EN 61000-6-2:2019
测量、控制和实验室用电气设备 - EMC 要求 第 3-1 部分:安全相关系统和旨在执行安全相关功能(功能安全)的设备的抗干扰要求 - 一般工业应用。该标准定义了安全相关功能的扩展 EMC 抗扰度要求。符合此标准可确保 UFactory 850 机器人的安全功能提供安全,即使其他设备超过 IEC 61000 标准中定义的 EMC 辐射限制。
7.3 使用环境
- 低湿度(25%-85% 无冷凝)
- 海拔高度:<2000m
- 环境温度:0°C ~ 50°C
- 避免阳光直射(室内使用)
- 无腐蚀性气体或液体。
- 无易燃材料。
- 无油雾。
- 无盐雾。
- 无灰尘或金属粉末。
- 无机械冲击、振动。
- 无电磁噪声。
- 无放射性物质。
7.4 运输、存储和搬运
- 通过UFactory studio将机器人移动到零点,然后将 UFactory 850机器人和控制器放入原包装中。
- 使用原包装运输机器人。
- 将机械臂从包装移至安装地点时,同时提起机械臂两侧的连杆,将机器人固定到位,直到所有安装螺栓都牢固地拧紧在机器人底座上。
- 控制器箱应通过手柄提起。
- 将包装材料保存在干燥的地方,以后可能需要打包和运输机器人。
7.5 控制器放置高度
- 控制器应放置在0.6m至1.5m的高度。
7.6 电源连接
本产品电源切断方式为插头/插座连接方式,所以在使用本产品的时候,建议配备适当的具有足够分断能力的开关电器。
(如空气开关 绝缘电压:400V AC 额定电流:10A )
7.7 特殊耗材
- 保险丝规格:15A 250V 5×20mm Time-Lag 玻璃体筒式保险丝
7.8 停机类别
停止类别1和停止类别2会在驱动器电源打开的情况下使机器人减速,这使机器人能够在不偏离当前路径的情况下停止。
| 安全输入 | 描述 |
|---|---|
| 控制器上的紧急停止按钮 | 1类停机 |
| 控制器上的紧急停止输入(EI) | 1类停机 |
| 控制器上的防护停止输入(SI) | 2类停机 |
7.9 停止时间和停止距离
1类停机的停止距离和时间:
下表包括触发1类停机时测量的停止距离和停止时间。 这些测量值对应于机器人的以下配置:
- 臂展:100%(机器人手臂完全水平伸展) 。
- 速度:100%(机器人的一般速度设为100%,以180°/s 的关节速度进行移动) 。
- 负载: 机械臂可以承受的最大有效载荷(5 kg).
通过执行水平移动( 即旋转轴垂直于地面) 对关节1 进行测试。在对关节2 和关节3 的测试过程中,机器人遵循垂直轨迹,即旋转轴平行于地面,并在机器人向下移时停止。
| 停止距离(rad) | 停止时间(ms) | |
|---|---|---|
| 关节1 | 0.62 | 521 |
| 关节2 | 1.12 | 885 |
| 关节3 | 0.67 | 577 |