3. 电气接口
3.1 电气警告和注意事项
在设计和安装机器人应用时,务必遵循以下警告和注意事项。实施维护作业同样要遵循这些警告和注意事项。 
3.2 交流控制器
3.2.1 硬件接口
3.2.2 外部电源
控制器电缆末端有一个标准 IEC 插头。将当地专用的市电插座或电缆连接到IEC 插头。控制器由 100V-240V 交流电供电,输入频率 为47-63HZ,其内部的开关电源把 100V-240V 交流电转化为 12V、48V 直流电,为控制器内负载和机械臂供电。所以使用前必须检查机械臂与控制器间的连线是否牢靠。控制器中有硬件防护和软件防护,最大程度保证在使用时的安全。控制器的急停按钮,用户可在最短时间内切断机械臂电源,保护人员和设备的安全。
要使机械臂通电,控制器必须与电源相连。这个过程必须使用相应的 IEC C19 电线连接控制器的标准 IEC C20 插头来完成,请参见下图。 
3.2.3 航空接口定义
电源与信号线接口定义: 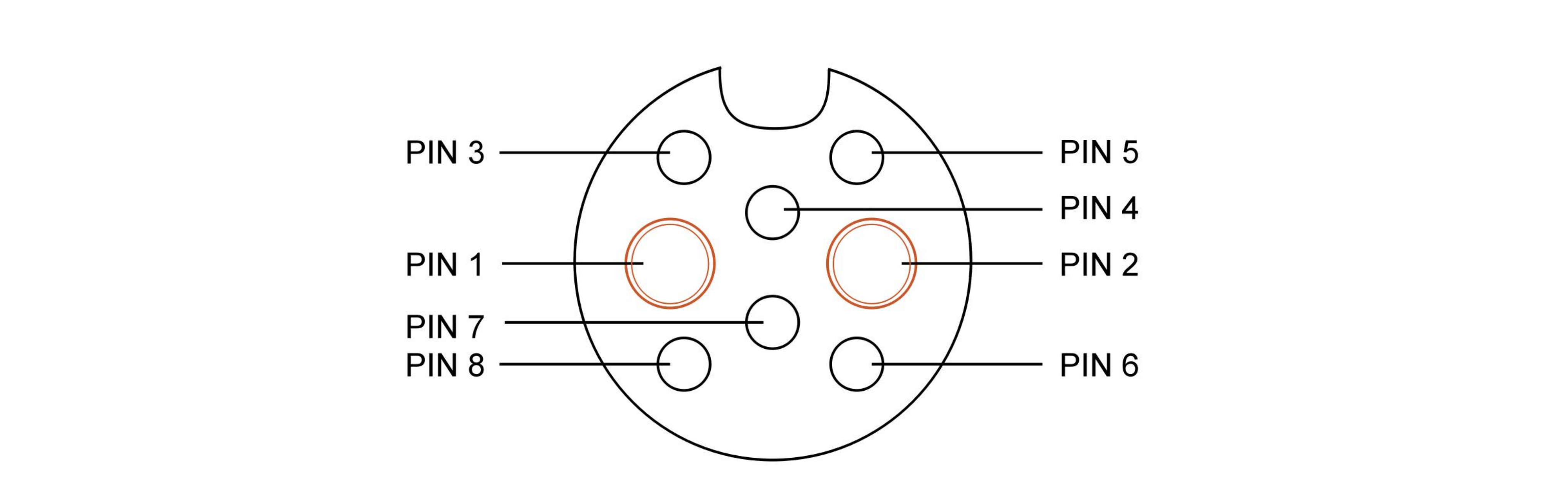
8芯航空插头(机械臂信号):
| 线序 | 功能定义 | 线序 | 功能定义 |
|---|---|---|---|
| 1 | 48V | 5 | 485-B绿白 手臂 |
| 2 | GND | 6 | 485-B蓝白 末端工具 |
| 3 | 485-A绿 手臂 | 7 | 屏蔽 |
| 4 | 屏蔽 | 8 | 485-A蓝 末端工具 |
3.3 直流控制器
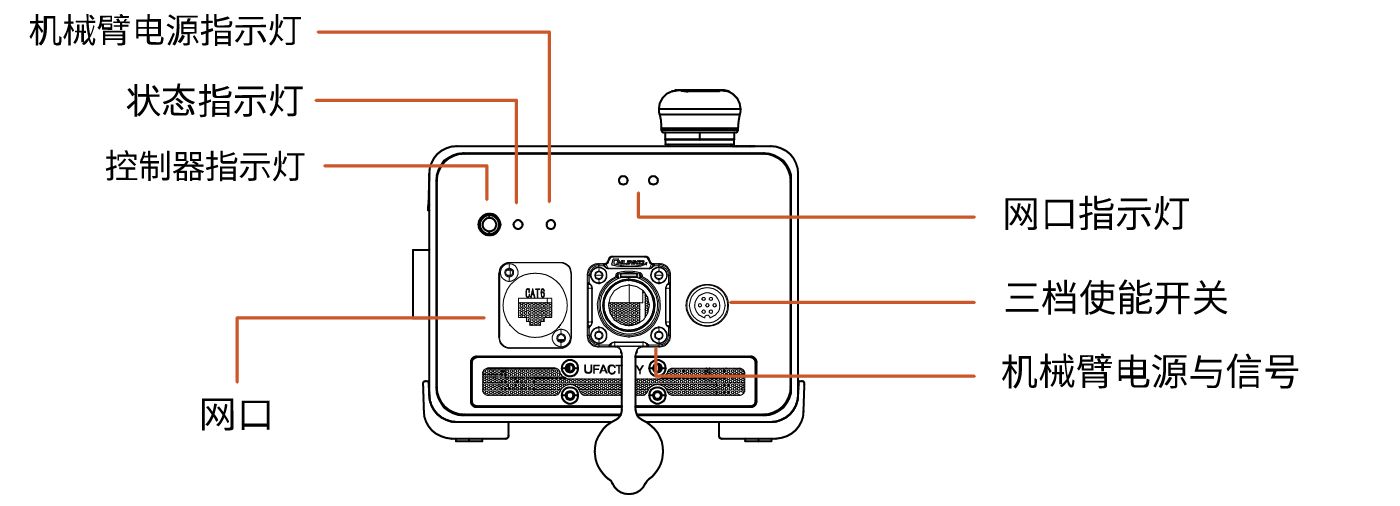
3.3.1 硬件接口
机械臂电源指示灯:机械臂使能后常亮红色。
状态指示灯:开机后常亮绿色。
电源调试开关:仅供内部调试使用。
网口灯:连接网络后,左灯闪烁,右灯常亮。
连接:发货时自带一根机械臂电源和通讯信号转接线,如下图进行连接。 
3.3.2 外部电源
| DC8500输入电源 | |
|---|---|
| VP+(输入) | 48-72VDC,推荐500W及以上电源 |
| PE | 漏电保护(接外壳),可以不接 |
| GND | 地线 |
| 输出 | 48VDC 960Wmax |
注意: 如果输入的电源功率过低,可能会出现关节欠压,无法使能手臂,通讯失败,控制器不断重启等现象。
3.3.航空接头定义
机械臂电源/通讯信号:
| 线序 | 功能定义 | 线序 | 功能定义 |
|---|---|---|---|
| V+ | 48V | V- | GND |
| PIN1 | 485-A 手臂 | PIN2 | 485-A 手臂 |
| PIN3 | PE:漏电保护(接外壳),可不接 | PIN4 | PE:漏电保护(接外壳),可不接 |
| PIN5 | 485-A 工具 | PIN6 | 485-B 工具 |
3.4 控制器IO
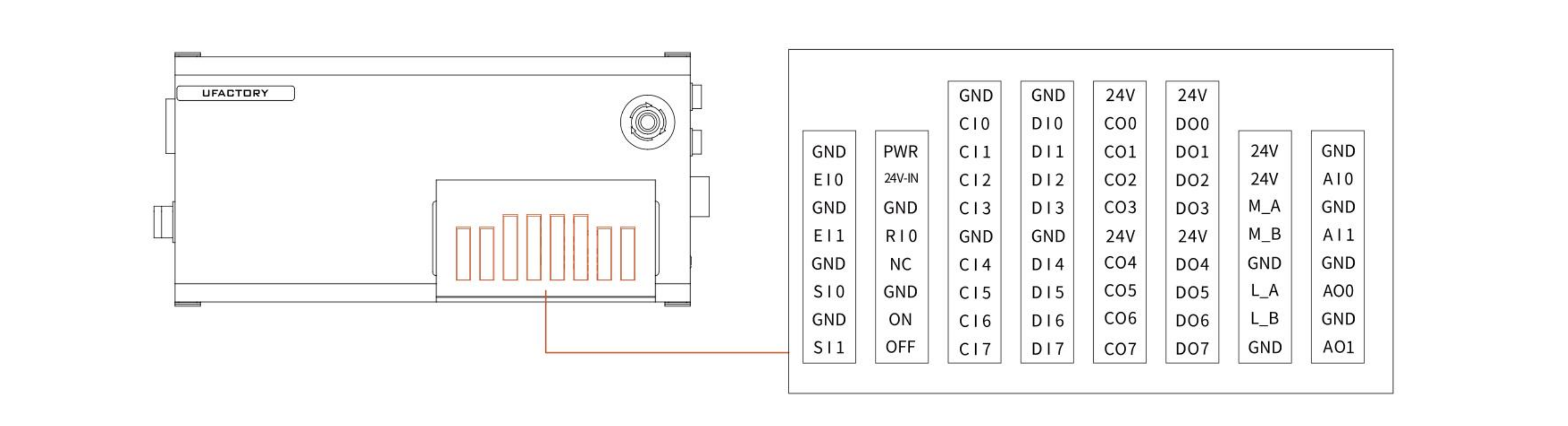
本章说明了如何连接设备与控制器外部的 I/O。此 I/O 极其灵活,可用于多种不同的设备,其中包括气动继电器、PLC 和紧急停止按钮。 下图显示了控制器内部的电气接口布局。 
可配置功能:
| 可配置功能 | CI0-CI7(可配置输入) | DI0-DI7(数字输入) |
|---|---|---|
| 通用输入 | 是 | 是 |
| 停止运动 | 是 | 否 |
| 防护重置 | 是 | 否 |
| 离线任务 | 是 | 是 |
| 手动模式 | 是 | 是 |
| 缩减模式 | 是 | 否 |
| 使能机械臂 | 是 | 是 |
| 可配置功能 | CO0-CO7(可配置输入) | DO0-DO7(数字输出) |
|---|---|---|
| 通用输出 | 是 | 是 |
| 运动停止 | 是 | 是 |
| 运动中 | 是 | 是 |
| 有错误 | 是 | 是 |
| 有警告 | 是 | 是 |
| 发生碰撞 | 是 | 是 |
| 手动模式生效 | 是 | 是 |
| 缩减模式生效 | 是 | 是 |
| 离线任务进行中 | 是 | 是 |
| 机械臂已使能 | 是 | 是 |
| 紧急停止按钮被按下 | 是 | 是 |
按照电气规范安装UFACTORY 850机械臂是非常重要的,这二类不同的输入都要做到这一点。数字 I/O 可由内部 24V 电源供电,也可通过配置电源接线盒由外部电源供电。上面(PWR)为内部的 24V 电源输出。下面的终端(24V-IN )为供应 I/O 的 24V 输入外部电源输入。默认配置为使用内部电源,参见下文。 
如果需要更大的电流,可如下图所示连接外部电源。 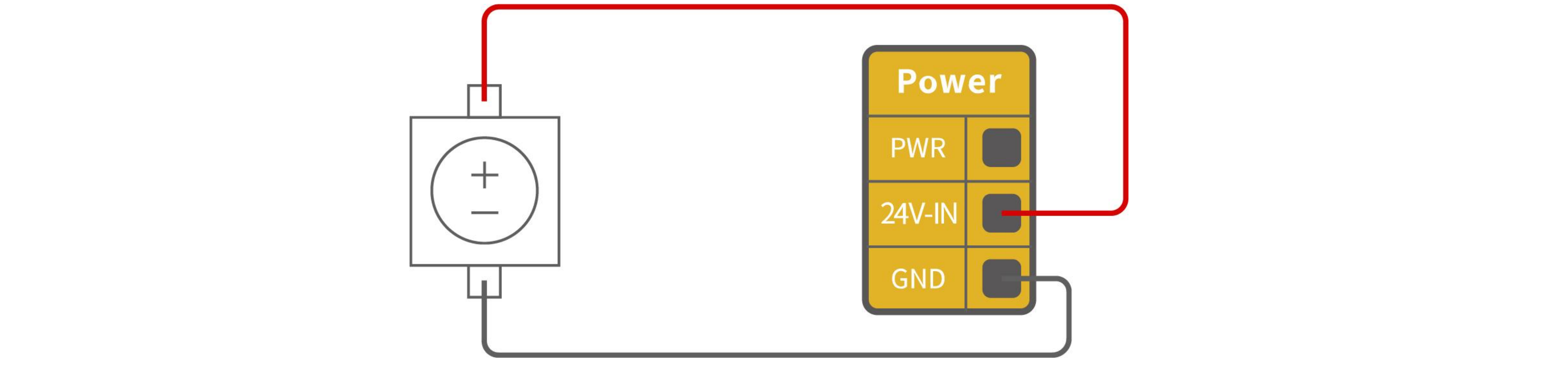
内部和外部电源的电气规范:
| 终端 | 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|
| 内置 24V 电源 | |||||
| [PWR - GND] | 电压 | 23 | 24 | 30 | V |
| [PWR - GND] | 电流 | 0 | - | 1.8 | A |
| 外部 24V 输入要求 | |||||
| [24V - 0V] | 电压 | 20 | 24 | 30 | V |
| [24V - 0V] | 电流 | 0 | - | 3 | A |
控制器数字I/O电气规范: (对于最大 1H 的电阻负载或电感性负载)
| 终端 | 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|---|
| 控制器数字输出 | |||||
| [COx] | 电流 | 0 | - | 100 | mA |
| [COx] | 电压降 | 0 | - | 0.5 | V |
| [COx] | 漏电流 | 0 | - | 0.1 | mA |
| [COx] | 功能 | - | NPN(OC) | - | 类型 |
| 控制器数字输入 | |||||
| [EIx/SIx/CIx/RIx] | 电压 | 0 | - | 30 | V |
| [EIx/SIx/CIx/RIx] | OFF区域 | 15 | - | 30 | V |
| [EIx/SIx/CIx/RIx] | ON 区域(低电平) | 0 | - | 5 | V |
| [EIx/SIx/CIx/RIx] | 电流(0-0.5) | 3 | - | 8 | mA |
| [EIx/SIx/CIx/RIx] | 功能 | - | - | - | 类型 |
警告:
控制器的数字输出端没有电流限制,若超过所规定的数据,可能会导致永久性损坏。
3.4.1 安全IO(EI/SI)
所有安全 I/O 成对存在(冗余),必须保留成两个独立的分支。单一故障应不会导致丧失安全功能。固定的安全输入有两个:机械臂紧急停止和防护停止。机械臂紧急停止输入仅用于紧急停止设备。防护停止输入用于所有类型的安全型保护设备。功能差异如下所示。
| 紧急停止 | 防护停止 | |
|---|---|---|
| 机械臂停止运动 | 是 | 是 |
| 程序执行 | 停止 | 暂停 |
| 重置 | 手动 | 自动或手动 |
| 使用频率 | 不常使用 | 没有限制 |
| 需要重新初始化 | 仅释放制动器 | 否 |
默认出厂安全配置 所交付的机械臂进行了默认配置,可在没有任何附加安全设备的情况下进行操作,请参阅下图,若手臂出现问题,请第一时间检查下图连线是否正确。 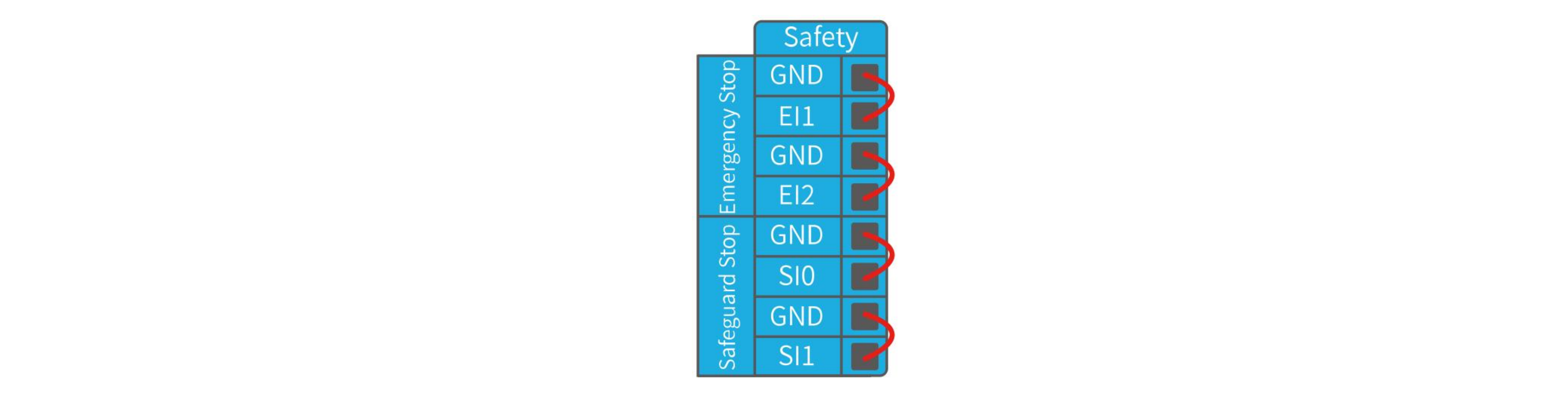
3.4.1.1 连接紧急停止按钮
可用IO: EI1、EI2、SI0、SI1;
在大多数应用中,需要使用一个或多个额外的紧急停止按钮。下图显示了如何连接一个或多个紧急停止按钮。 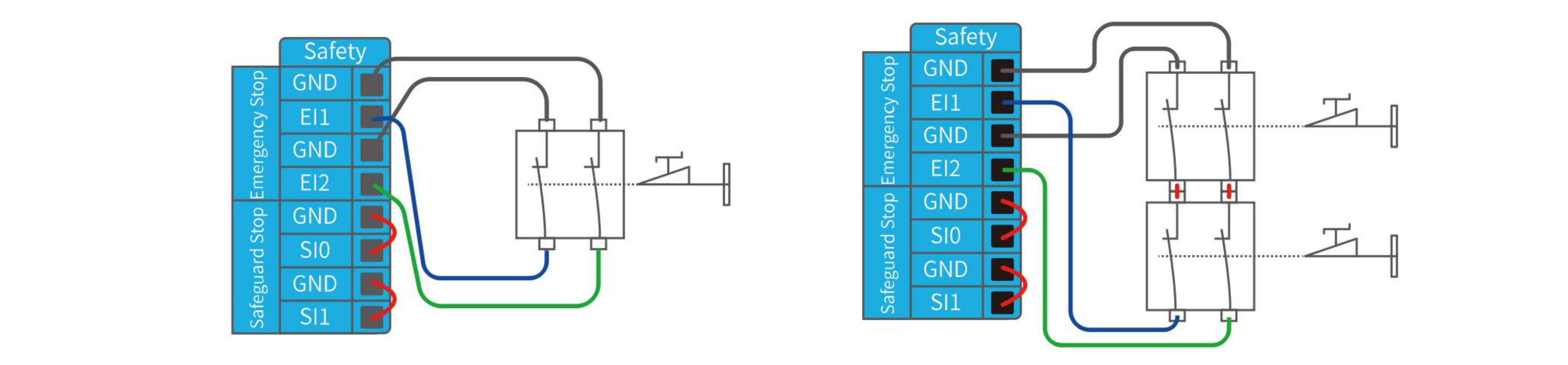
3.4.1.2 与其他机器共享紧急停止
可用IO: EI1、EI2、SI0、SI1;
当机械臂与其他机器搭配使用时,往往需要设置一条公共的紧急停止电路。下图显示了两台机械臂共享一个急停按钮(下图所示的连接方法同样适用于多台机械臂共享一个急停按钮)。 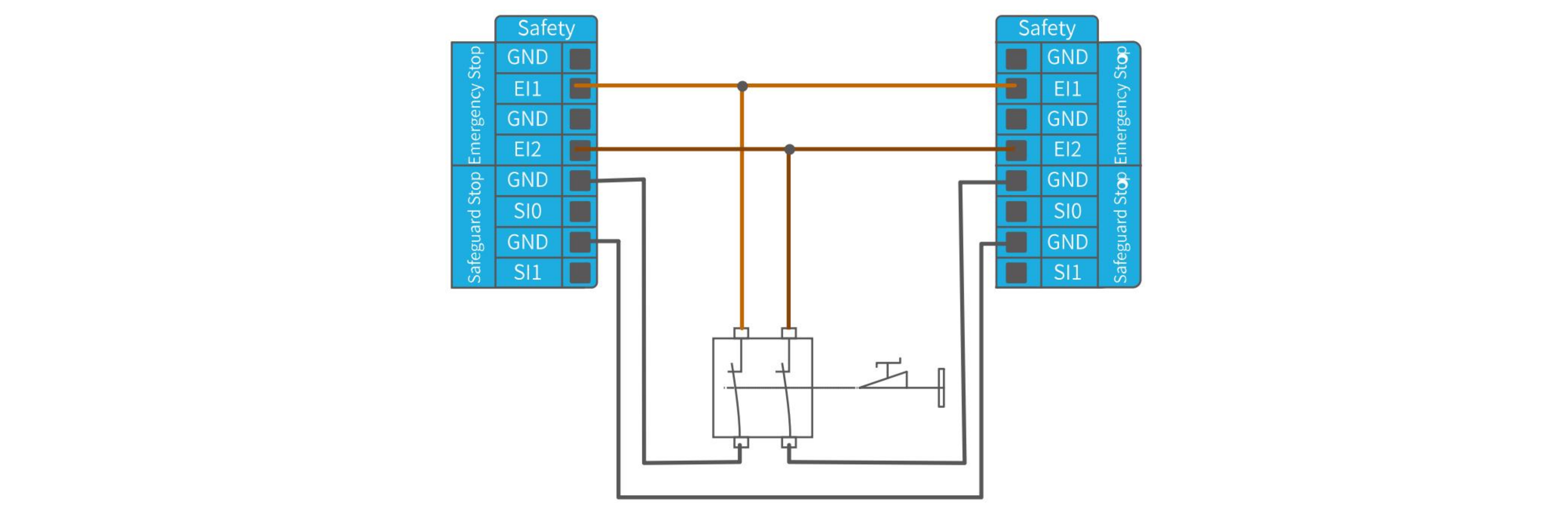
3.4.1.3 可自动恢复的防护停止
门开关就是基本防护停止设备的一个例子,门打开时,机器人停止,请参见下图。  此配置仅针对操作员不能通过门并在身后关上门的应用。可配置的 I/O 可以用于设置门外的重置按钮,以重新激活机器人运动。适合进行自动恢复的另外一个例子是使用安全垫或安全型激光扫描仪,参见下图。
此配置仅针对操作员不能通过门并在身后关上门的应用。可配置的 I/O 可以用于设置门外的重置按钮,以重新激活机器人运动。适合进行自动恢复的另外一个例子是使用安全垫或安全型激光扫描仪,参见下图。 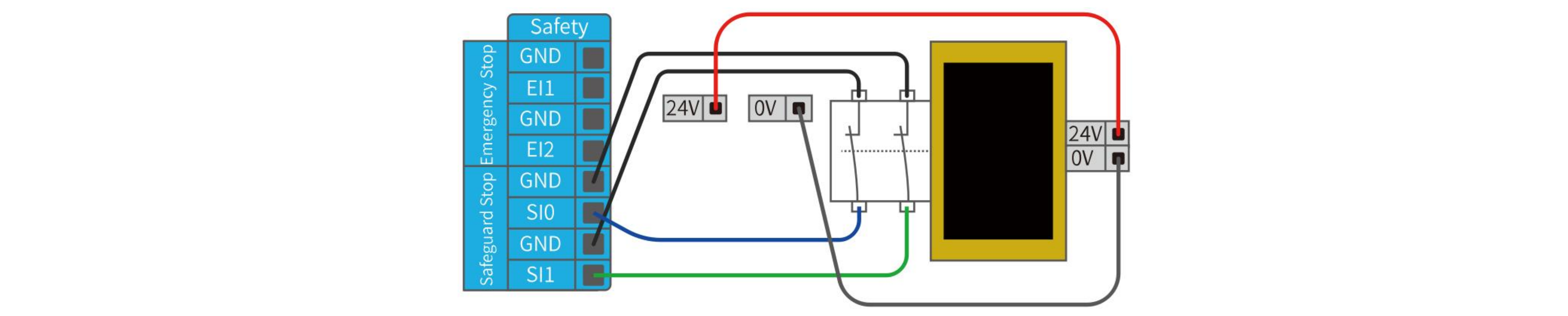
3.4.1.4 带重置按钮的防护停止
如果使用防护接口与光幕交互,需要从安全地带外部进行重置。重置按钮必须为双通道型按钮。在本例中,将I/O 输入口CI0-CI1配置为防护停止(在UFactory studio中也要做相应的配置),参见下图。 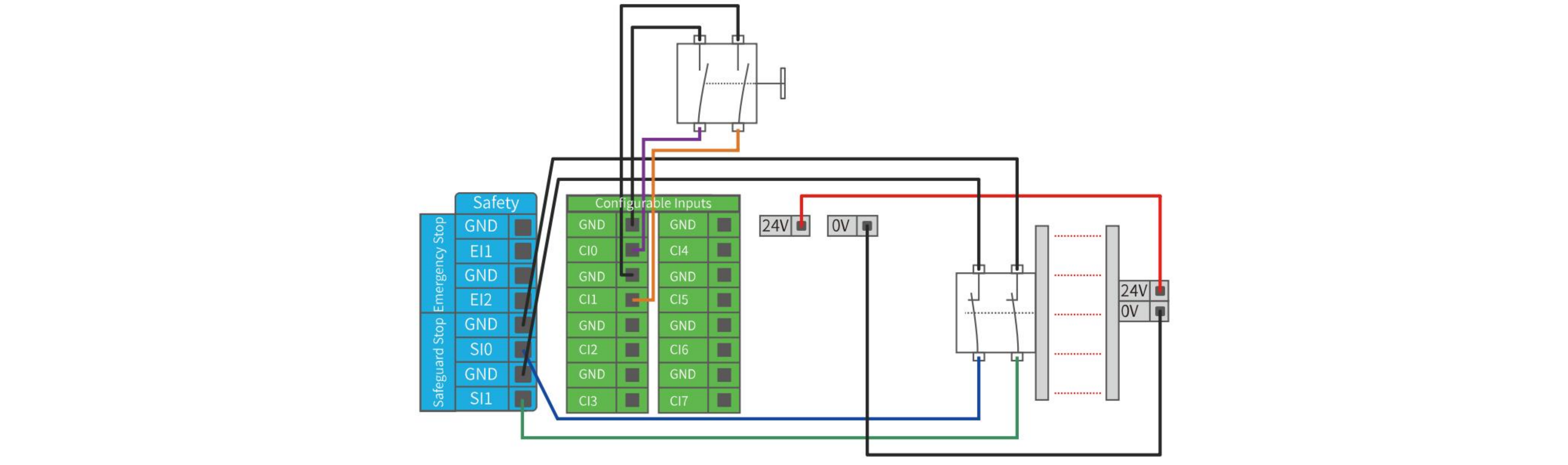
如何实现带重置按钮的防护停止功能:
- 在UFactory studio里将CI0配置为防护重置,具体步骤如下图: 进入设置 - 外接设备 - 控制器IO - 将CI0配置为防护重置 - 点击保存。
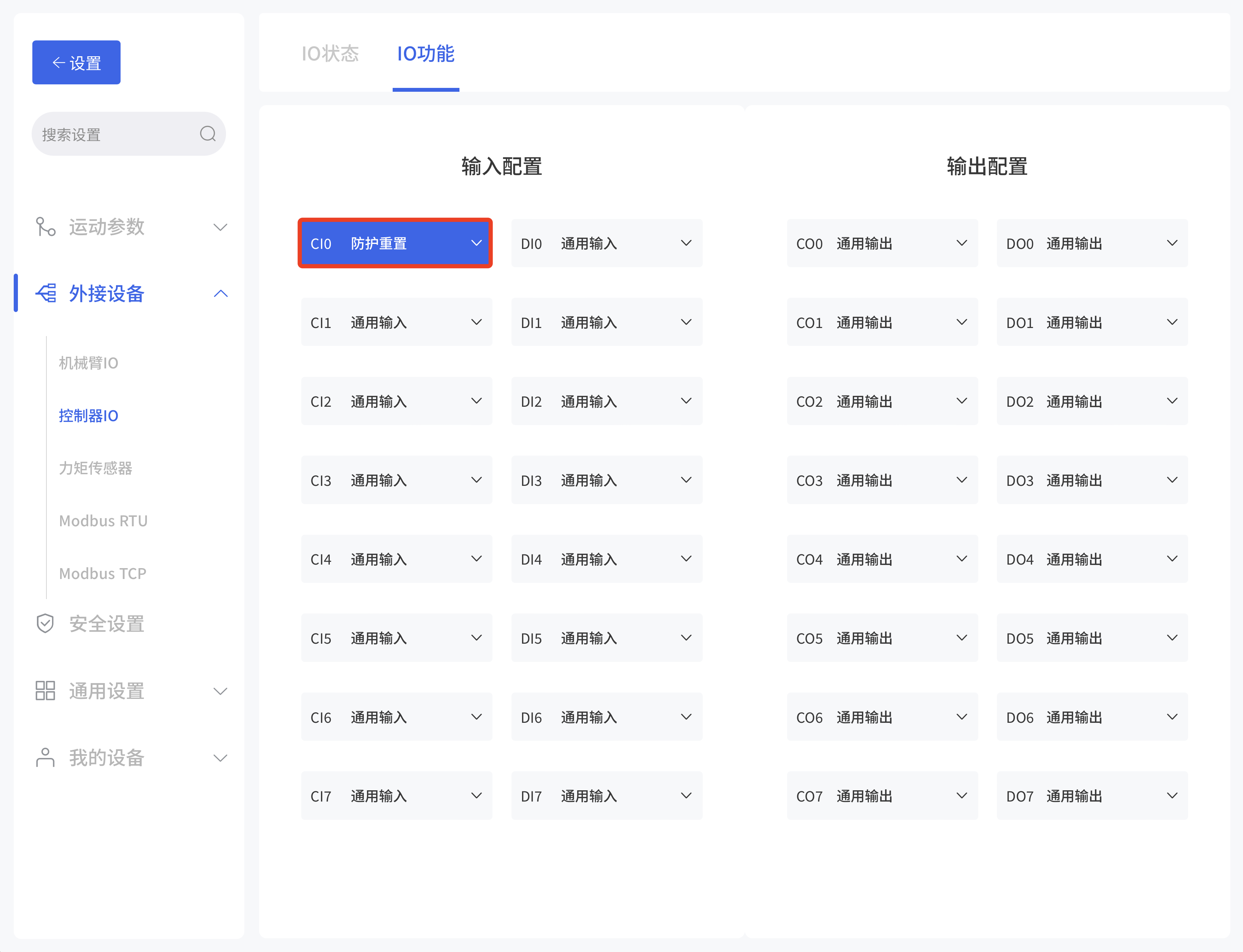
- 若需要机械臂恢复运动,则将SI0和SI1接地,并通过将CI0接地来触发机械臂运动;若需要机械臂暂停运动,则将SI0和SI1悬空。
注意: DI0-DI7不能配置以下功能:停止运动、缩减模式、防护重置。
3.4.2 数字输入输出(CICO)
3.4.2.1 数字输入(CI)
数字输入以配有弱上拉电阻器的形式实现。这意味着浮置输入的读数始终为高。 本例显示了简单按钮与数字输入的连接方式。 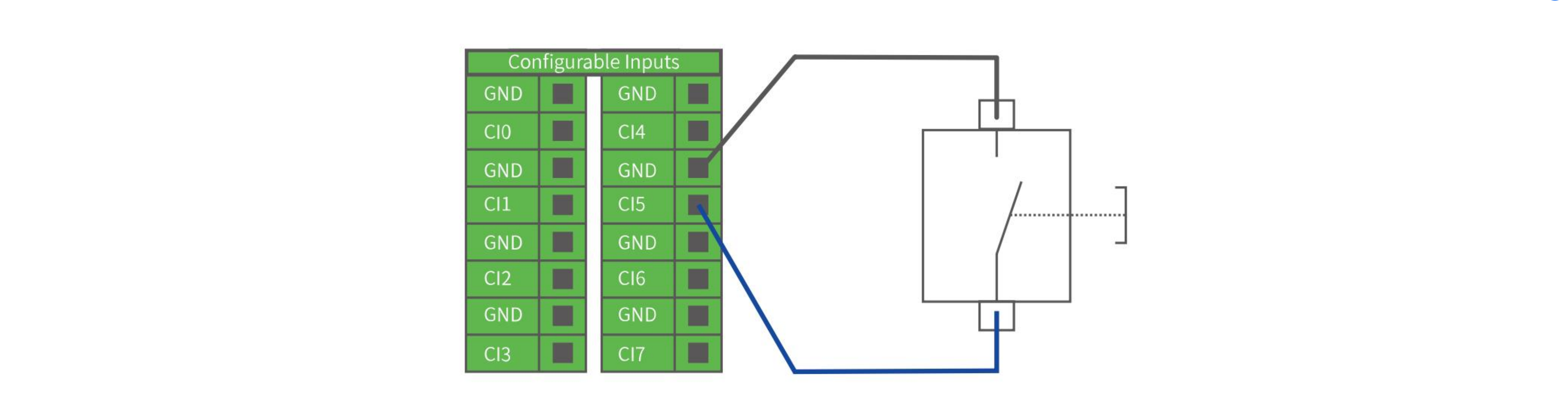
3.4.2.2 数字输出(CO)
控制器数字输出以NPN的形式实现。数字输出激活后,相应的接头即会被驱动接通 GND,数字输出端禁用后,相应的接头将处于开路(开集/开漏)。 下例说明了如何使用数字输出,因为内部输出为开漏输出,所以需要根据负载上接电阻到电源。电阻的大小及功率视具体使用情况。 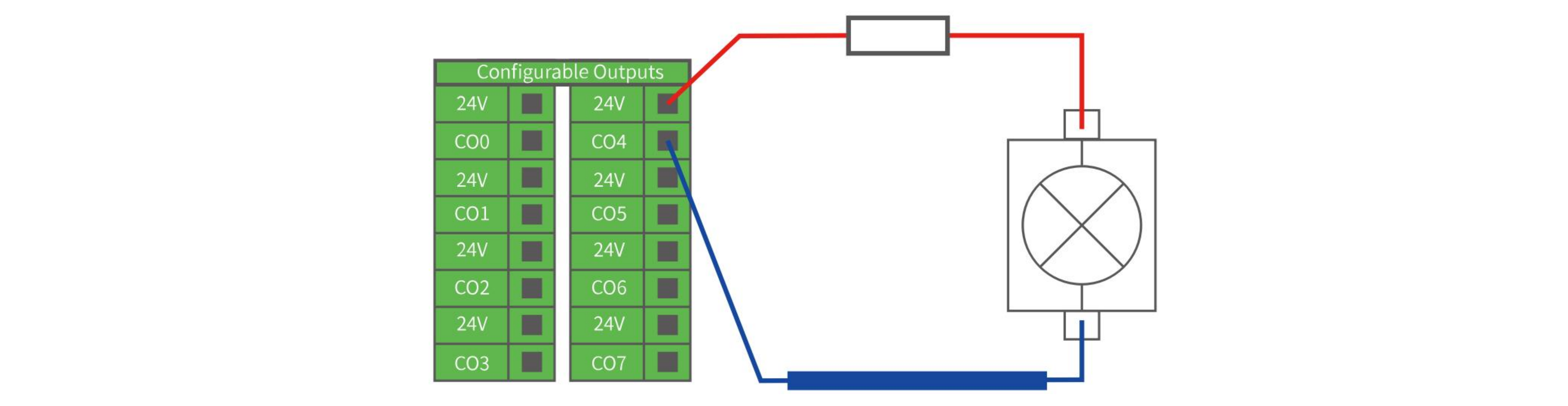
注意:强烈推荐为电感性负载使用保护二极管,如下所示。 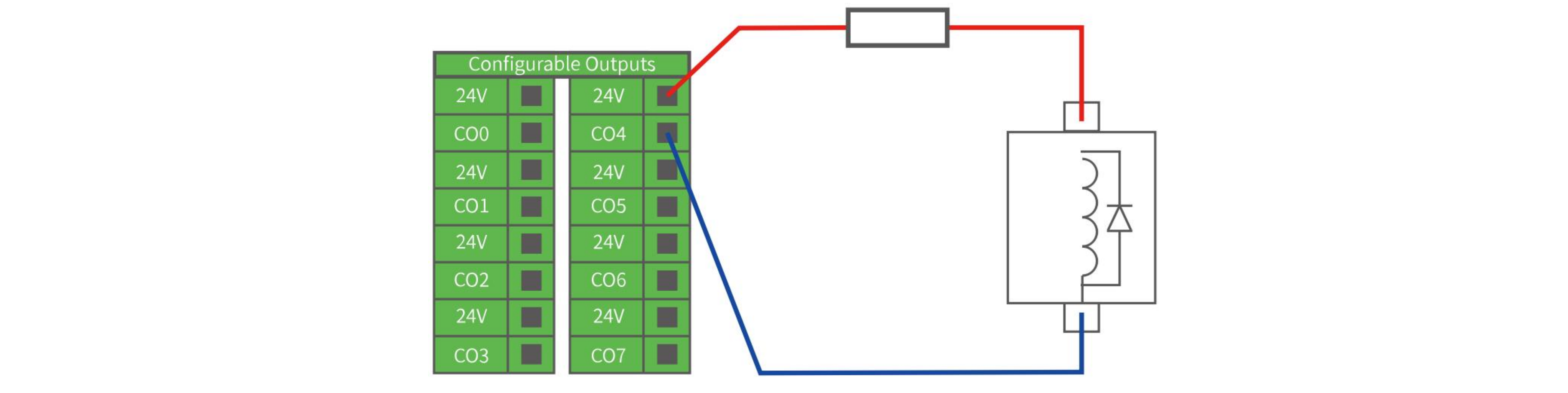
3.4.2.3 与其他机器或PLC通信
如果建立了通用 GND (0V)并且机器采用开漏输出技术,则可使用数字 I/O 与其他 设备通信,参见下图。 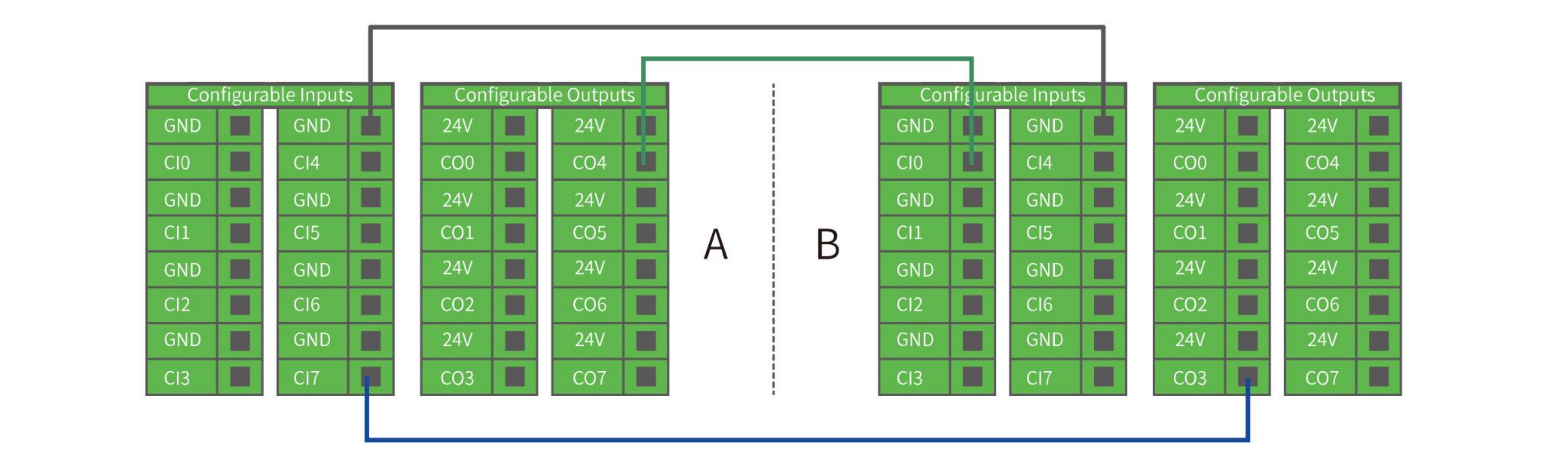
3.4.3 模拟IO(AIAO)
此类接口可用于设置或测量进出其他设备的电压(0-10V)。
为获得最高准确度,建议遵循以下说明:
- 使用最靠近此 I/O 的 GND 终端。
- 设备和控制器使用相同的接地(GND)。
- 模拟 I/O 与控制器不进行电位隔离。
- 使用屏蔽电缆或双绞线。将屏蔽线与电源端子上的GND终端相连。
| 电压模式下的模拟输入 | |||||
|---|---|---|---|---|---|
| 终端 | 参数 | 最小值 | 典型值 | 最大值 | 单位 |
| [AIx - AG] | 电压 | 0 | - | 10 | V |
| [AIx - AG] | 电阻 | - | 10K | - | Ω |
| [AIx - AG] | 分辨力 | - | 12 | 12 | 位 |
| 电压模式下的模拟输出 | |||||
|---|---|---|---|---|---|
| 终端 | 参数 | 最小值 | 典型值 | 最大值 | 单位 |
| [AOx - AG] | 电压 | 0 | - | 10 | V |
| [AOx - AG] | 电流 | 0 | - | 20 | mA |
| [AOx - AG] | 电阻 | - | 100K | - | Ω |
| [AOx - AG] | 分辨力 | - | 12 | - | 位 |
3.4.3.1 模拟输入示例
下例说明了如何连接模拟传感器(接AI0或者AI1)。 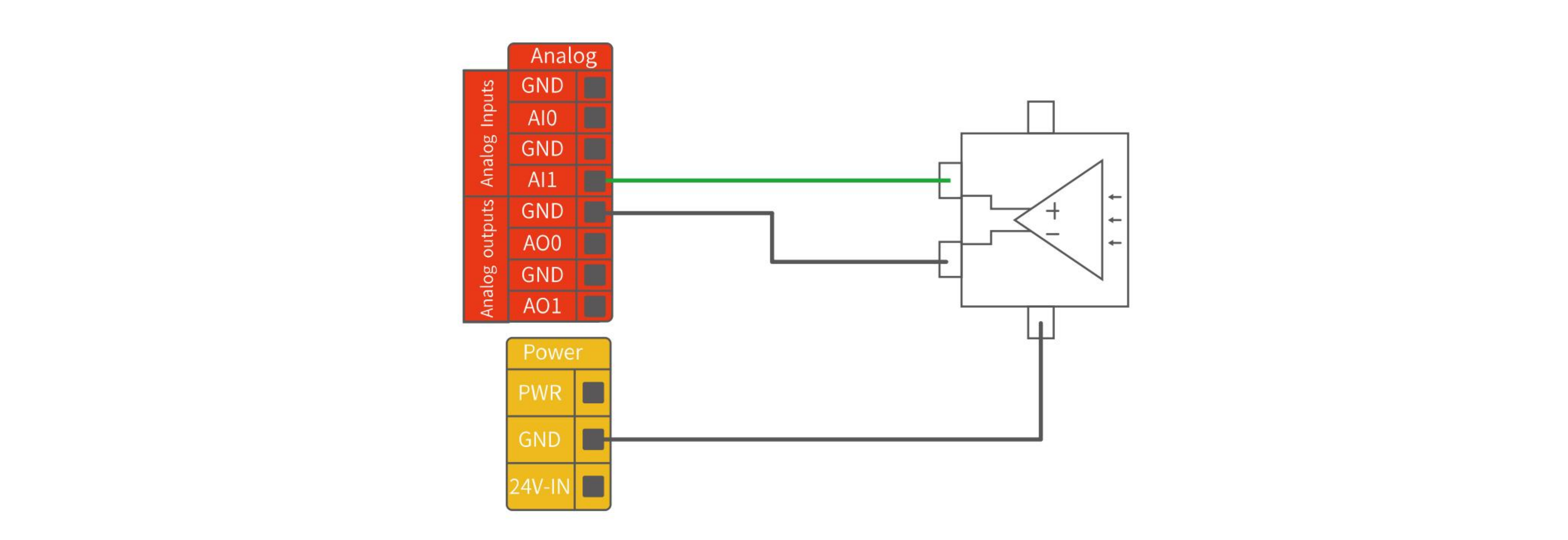
3.4.3.2 模拟输出示例
下例说明了如何利用模拟速度控制输入来控制传送带(接AO0或者AO1)。 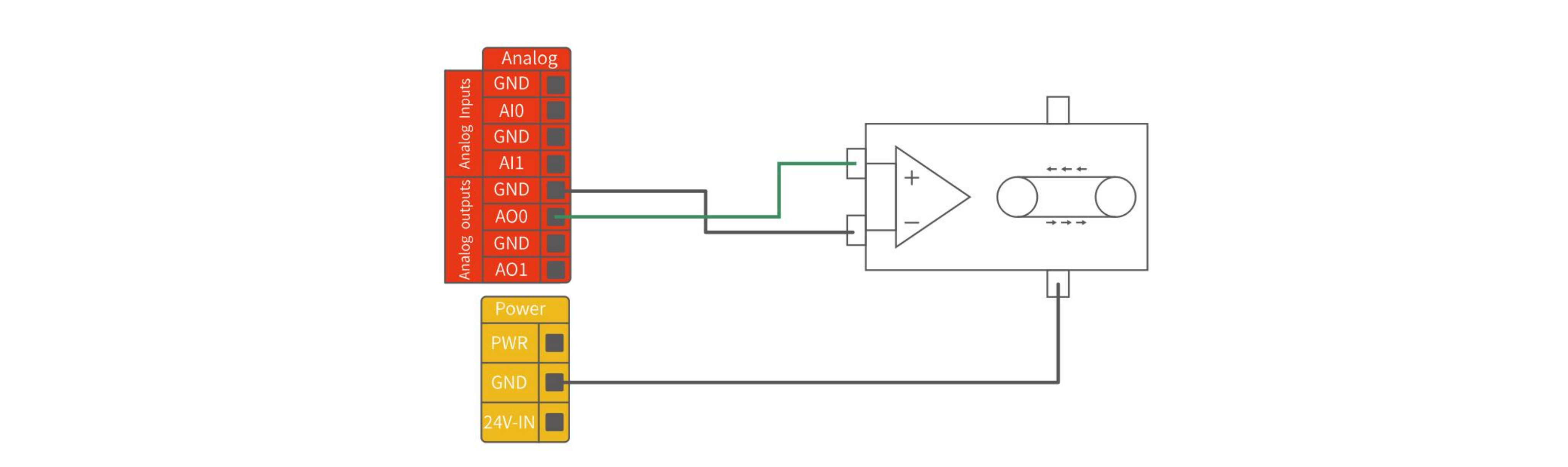
3.4.4 控制器RS485
控制器IO提供RS485接口,支持接入RS485通讯的第三方设备。 控制器的ID为10。
可用IO:
- M_A
- M_B
- 24V
- GND
注意:
L_A和L_B为预留的RS485接口,暂时无功能,不可使用。 使用M_A和M_B时,机械爪只能当主机。
- 若第三方设备支持标准Modbus RTU协议,可通过UFACTORY Studio的Modbus RTU界面进行调试操作,RS-485端口选择控制盒。
- 如第三方设备不支持标准Modbus RTU协议,需要通过getset_tgpio_modbus_data接口进行操作,并将is_transparent_transmission参数设置为True,host_id设置为10。
3.5 末端法兰
机械臂末端工具法兰有6个 M6 螺纹孔和一个Ф6的定位孔,设计符合ISO 9409-1-50-4-M6标准。
若您要安装的末端执行器没有定位孔,安装末端执行器的方向务必以文件形式存档,避免因为换人重新安装末端执行器时方向出现错误,导致运行结果完全出乎意料。
工具法兰机械尺寸图,单位为mm: 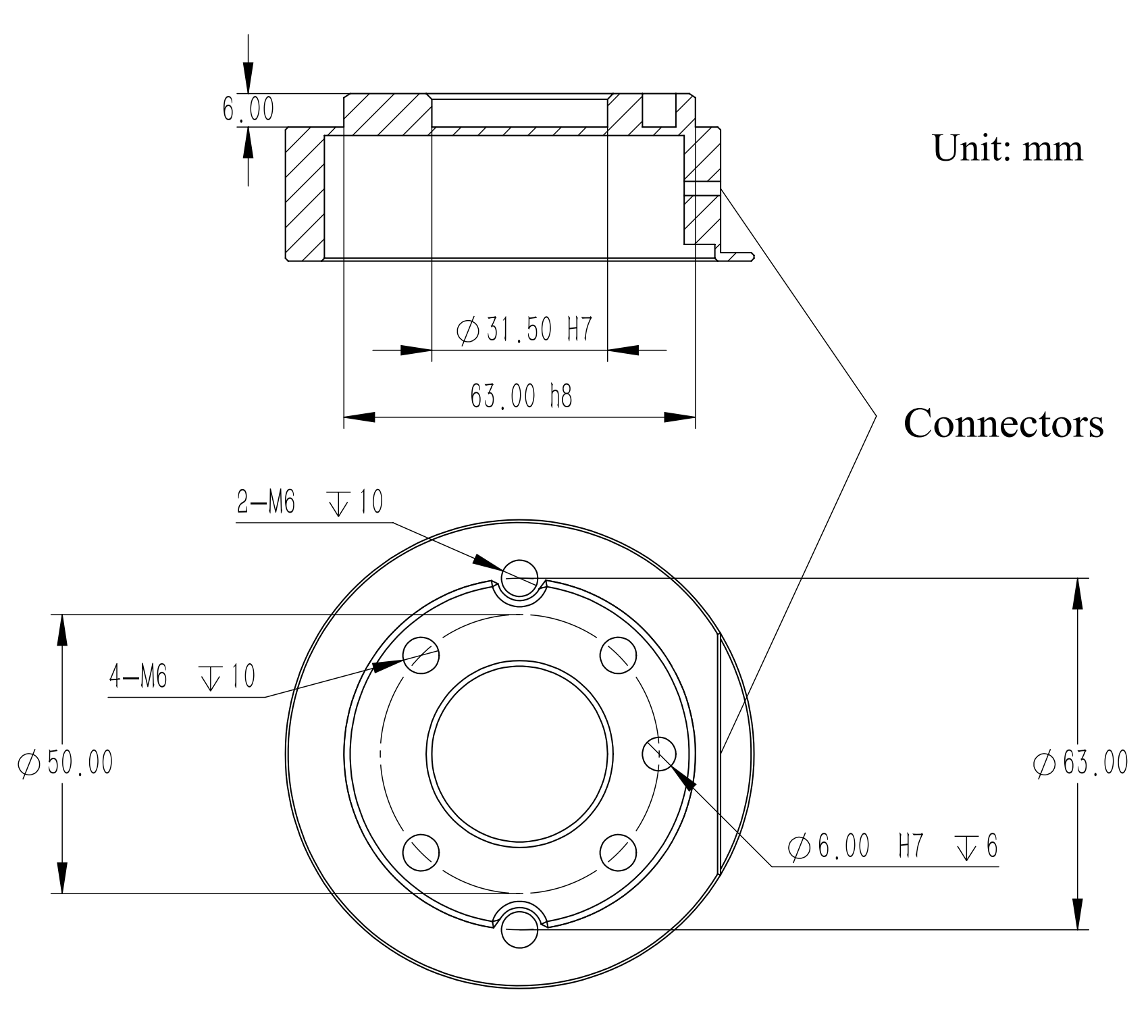
3.5.1 工具IO
在机械臂的工具端,有一个航空插座12 芯的母工业连接器,为特定机械臂工具上使用的夹持器和传感器提供电源和控制信号。请参见下图。 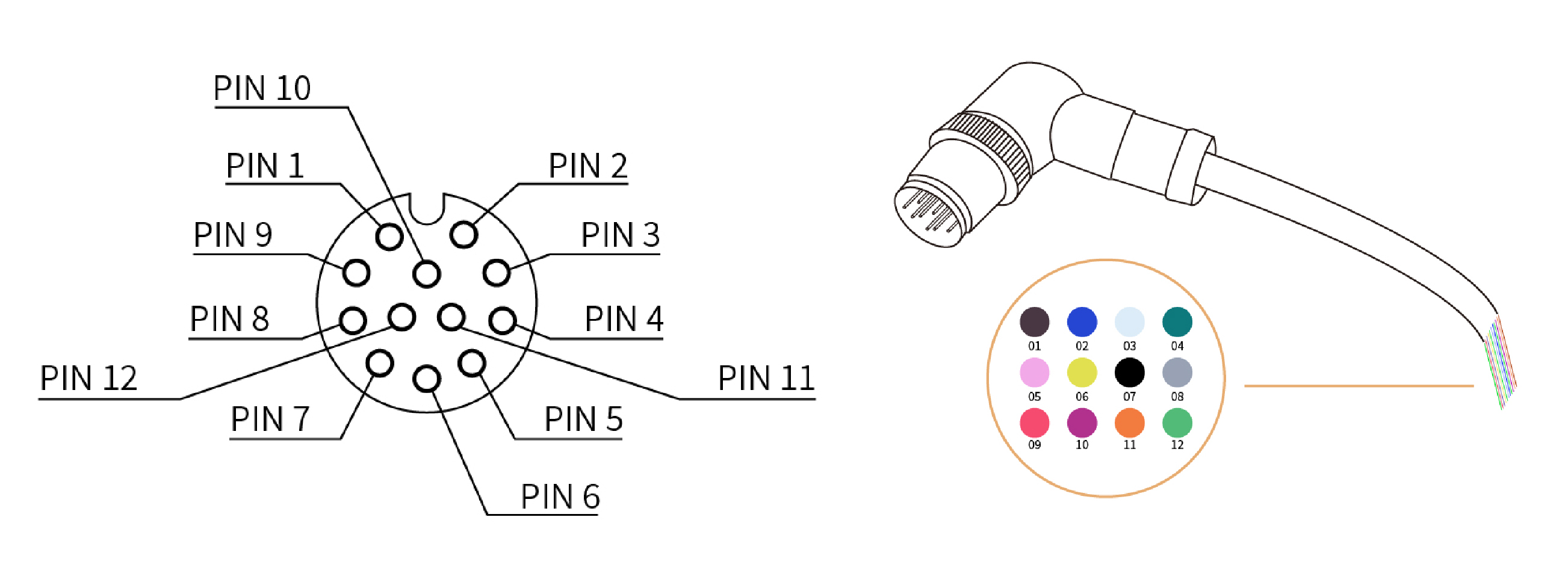
电缆内部的12条线有不同颜色,不同颜色代表不同功能,请参见下表:
| 线序 | 颜色 | 信号 | 线序 | 颜色 | 信号 |
|---|---|---|---|---|---|
| 1 | 棕 | +24V(电源) | 7 | 黑 | 工具输出0(TO0) |
| 2 | 蓝 | +24V(电源) | 8 | 灰 | 工具输出1(TO1) |
| 3 | 白 | 0V(GND) | 9 | 红 | 工具输入0(TI0) |
| 4 | 绿 | 0V(GND) | 10 | 紫 | 工具输入1(TI1) |
| 5 | 粉 | 用户485-A | 11 | 橙 | 模拟输入0(AI0) |
| 6 | 黄 | 用户485-B | 12 | 浅绿 | 模拟输入1(AI1) |
电气规格:
| 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 24V模式下的电源电压 | 20 | 24 | 30 | V |
| 电源电流 | - | - | 1800 | mA |
注意: 强烈推荐为电感性负载使用保护二极管。
3.5.2 工具数字输入(TI)
数字输入已配有下拉电阻器。这意味着浮置输入的读数始终为低。
电气规格:
| 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 输入电压 | -0.5 | - | 30 | V |
| 逻辑低电压 | - | - | 1.0 | V |
| 逻辑高电压 | 1.6 | - | - | V |
| 输入电阻 | - | 47K | - | Ω |
下例显示了简单按钮的连接方法。 
3.5.3 工具数字输出(TO)
数字输出以 NPN 的形式实现,集电极开路。数字输出激活后,相应的接头即会被驱动接通 GND,数字输出端禁用后,相应的接头将处于开路(开集/开漏)。
电气规格:
| 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 开路时的电压 | -0.5 | - | 30 | V |
| 灌入 50mA 电流时的电压 | - | 0.05 | 0.2 | V |
| 灌电流 | 0 | - | 100 | mA |
| 通过 GND 的电流 | 0 | - | 100 | mA |
警告:
工具数字输出端没有电流限制,若超过所规定的数据,可能会导致永久性损坏。
下例说明了如何使用工具数字输出,因为内部输出为集电集开路,所以需要根据负载上接电阻到电源。电阻的大小及功率视具体使用情况而定。 
注意: 强烈推荐为电感性负载使用保护二极管,如下图所示。 
3.5.4 工具模拟输入(TAI)
工具模拟输入为非差分输入。
电气规范:
| 参数 | 最小值 | 典型值 | 最大值 | 单位 |
|---|---|---|---|---|
| 电压模式下的输入电压 | -0.5 | - | 3.3 | V |
| 分辨力 | - | 12 | - | 位 |
| 电流模式下的输入电流 | - | - | - | mA |
| 4mA 至 20mA 电流范围内的下拉电阻 | - | - | 165 | Ω |
| 分辨力 | - | 12 | - | 位 |
下例显示了模拟传感器与非差分输出的连接方式。
- 电压模式

- 电流模式

下例显示了模拟传感器与差分输出的连接方式。将负输出端连接至 GND (0V),即可像非差分传感器一样工作。
- 电压模式

- 电源模式

3.5.5 工具端RS485
工具末端提供RS485接口,支持接入RS485通讯的第三方设备。
工具末端的ID为9。
可用IO:
- PIN5:RS485-A
- PIN6:RS485-B
- PIN1&PIN2:24V
- PIN3&PIN4:24V
- 若工具端支持标准Modbus RTU协议,可通过UFACTORY Studio的Modbus RTU界面进行调试操作。
- 若工具端不支持标准Modbus RTU协议,需要通过getset_tgpio_modbus_data接口进行操作,并将is_transparent_transmission参数设置为True。
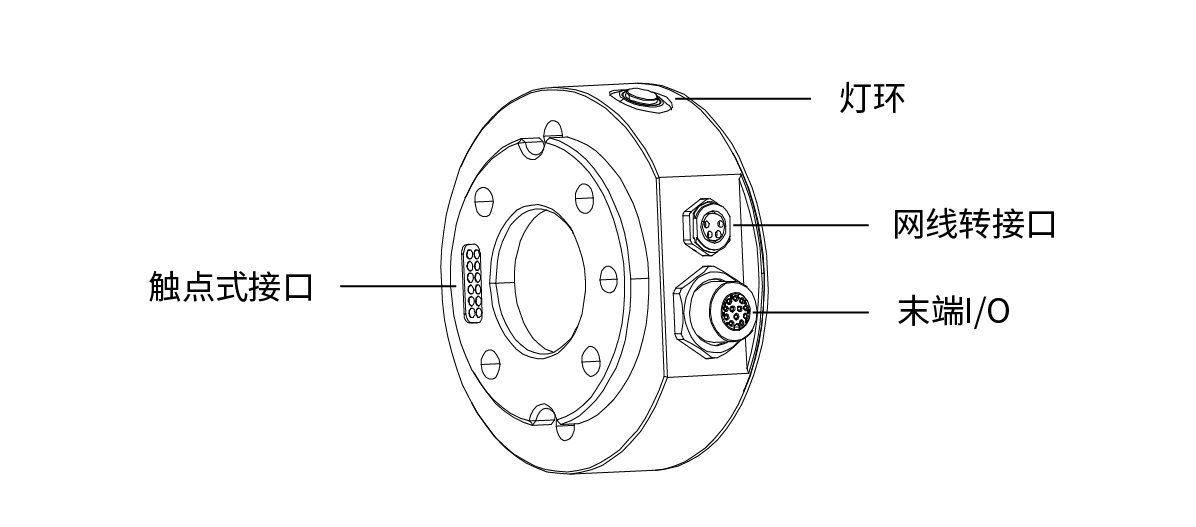
3.5.6 接触式接口
接触式接口定义: 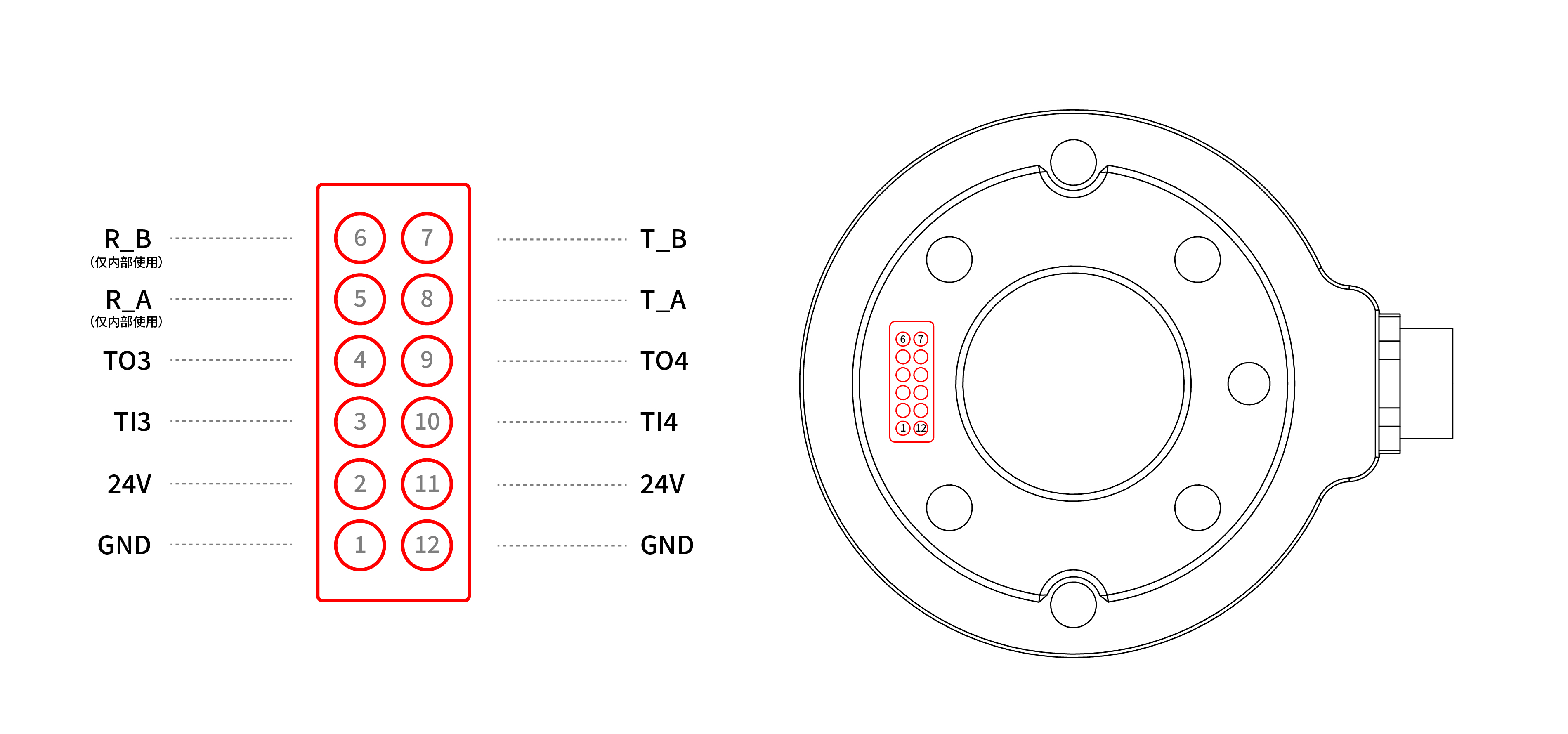 电气规格与末端IO一致。
电气规格与末端IO一致。
3.5.7 灯环
提供一个按钮和LED灯,按下按钮可以显示蓝色的环形灯。目前暂未定义,可进行自定义开发。 对应接口为使用TI2, TO2。
# 设置TO2为高,蓝色环形灯亮起
arm.set_tgpio_digital(ionum=2, value=1)
# 获取TI2的值,可自定义开发
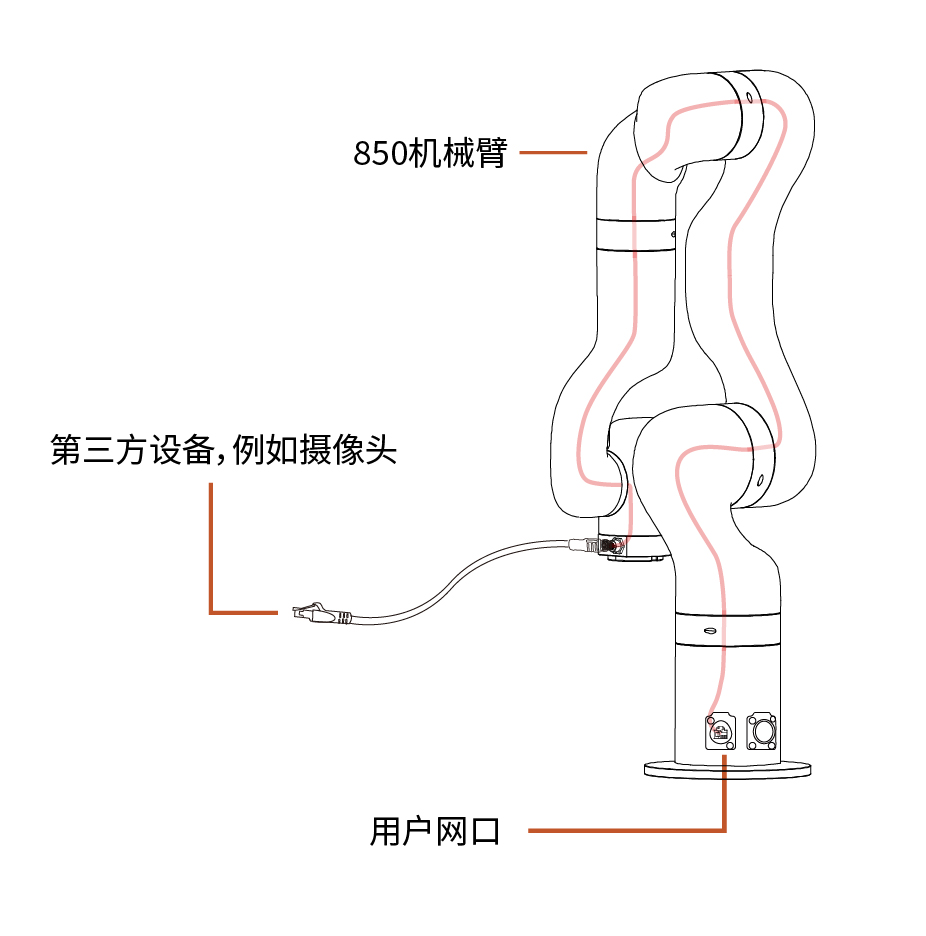
arm.get_tgpio_digital(ionum=2)3.5.8 网线转接口
手臂内部由一根100M支持标准CAT5的以太网电缆连接到机械臂底座的网口,与大多数第3方视觉设备兼容。如果不想当做是网线,也可以尝试将其作为物理信号线。出厂时标配一根网口转接线。